|
Система стабилизации по тангажу
| |
| avm | Дата: Понедельник, 31.08.2009, 15:20 | Сообщение # 1 |
 Подполковник
Группа: Администраторы
Сообщений: 107
Статус: Offline
| 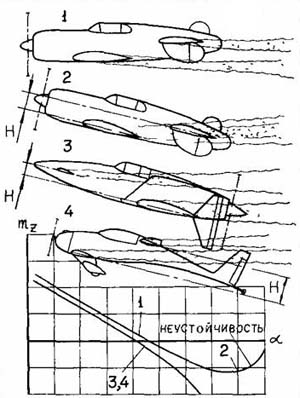 Самолёт П-6М выполнен по схеме "утка", а это значит, что летательным аппаратам этой схемы присуща продольная неустойчивость. Вместо того чтобы демпфировать движения самолета относительно поперечной оси (по тангажу), как это делает, например, оперение стрелы, воздействие воздушного потока на переднее горизонтальное оперение усиливает соответствующие возмущения. Например, в своих записках О. Райт отмечал, что устойчивость «утки» по тангажу определяется мастерством летчика. По схеме «утка» построены некоторые из современных самолётов, но системы управления у них обычно работают с использованием бортовых ЭВМ и автоматических средств повышения устойчивости, которые вырабатывают и осуществляют балансировочные команды, предотвращающие нарастание возмущений в канале тангажа. Я наверное и не обратил бы внимание на эти устройства (используемые в большой авиации), которые очень громоздки и безумно дороги для использования в СЛА, если бы не пара виде-офрагментов, демонстрирующих возможности современных электронных компонентов для радиоуправляемых моделей... 1. http://www.youtube.com/watch?v=WT5b1LwTKUk 2. http://www.youtube.com/watch?v=pLPK0nfACbI&feature=channel_page 3. http://www.youtube.com/watch?v=iSCq14Okhis&feature=channel_page 4. http://www.youtube.com/watch?v=1_Eh3pMC-1o&feature=channel После просмотра этих роликов, я резко переменил свою точку зрения, и теперь рассматриваю (пока теоретически) возможность использования в своем проекте П-6М электропривода руля высоты (РВ) в схеме с ЭСДУ для коррекции (от гироскопа) "ныряний" и "взмываний" самолёта от возмущений в атмосфере в продольной плоскости. Фактически это будет система стабилизации самолёта по тангажу.
- А вы молчите! Вы на контрольной такую херню про тахометр натворили !
|
| |
| |
| avm | Дата: Понедельник, 31.08.2009, 15:42 | Сообщение # 2 |
|
Подполковник
Группа: Администраторы
Сообщений: 107
Статус: Offline
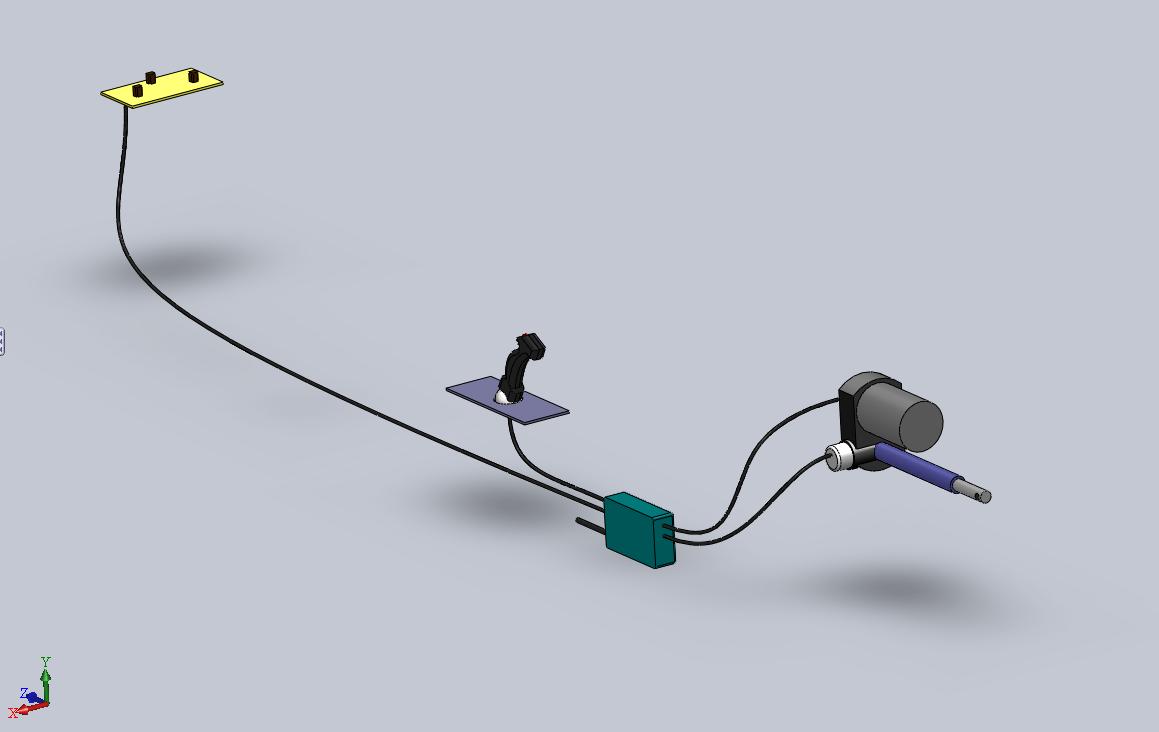
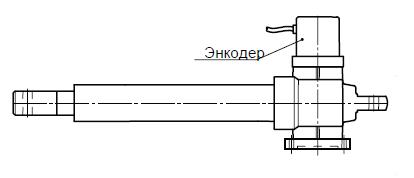
| Итак, главные действующие лица, предполагаемой системы: 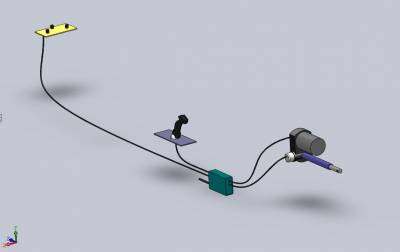 1. Джойстик: (например от HOTAS Cougar).  2. Сервопривод:  Тип UBA 1 - Шариковинтовой линейный механизм с прикрепленным двигателем по типу «наездник». Зубчато-ременный привод для достижения более высоких скоростей. Алюминиевые шкивы с низкой инерционностью позволяют достигать более быстрого линейного ускорения и замедления. Шарикоподшипник с предварительным натягом поддерживающий винтовую пару позволяет выдерживать более высокие осевые нагрузки, более высокие скорости, гарантирует отсутствие осевого зазора. Сжимающее или растягивающее усилие. Механизм снабжен длительной консистентной смазкой и не требует дополнительного обслуживания. Корпус из сплава алюминия. Внешняя труба из анодированного алюминия. Шток в трубе из хромированной толстостенной стали. Привод планируется в комплектации с кодирующими устройствами, тахогенератором (для электродвигателя) и потенциометром (датчиком положения), которые позволяют контролировать расположение и управлять перемещением штока. Привод способен выполнять те же функции, что и пневматические или гидравлические цилиндры, а именно:
- Прямолинейное перемещение рабочего органа.
- Остановка в любом нужном положении.
- Удерживание нагрузки в любом положении.
- Потребление энергии только при перемещении. - Максимальное усилие [Н] 1.750
- Максимальная скорость [мм/с] 185
- Стандартная длина штока [мм] 100, 200, ...
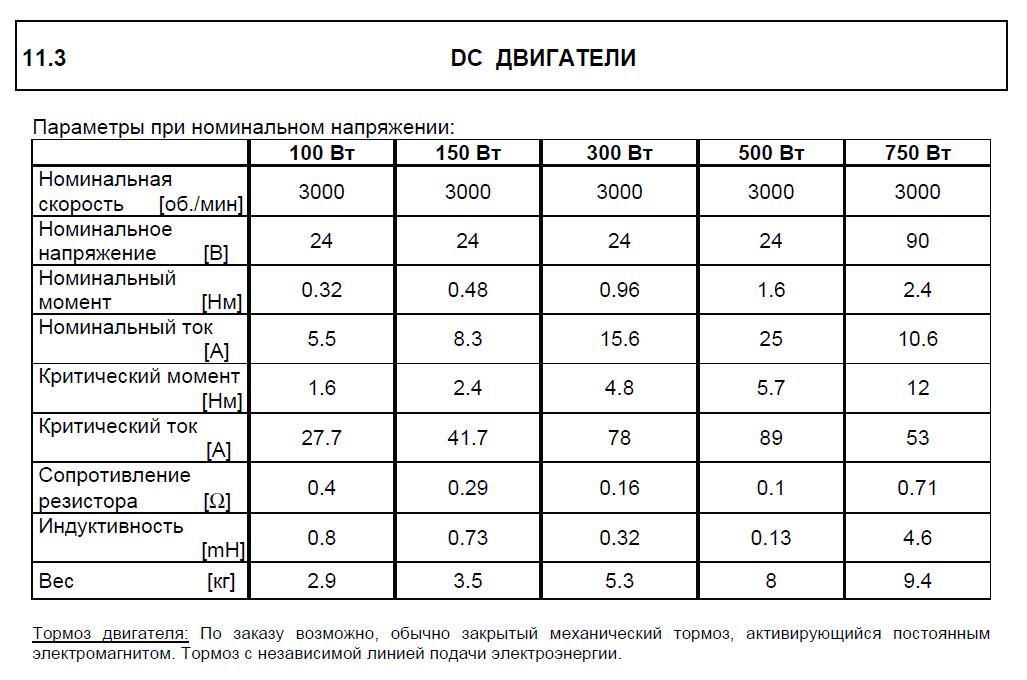
- DC двигатель постоянного тока 12 В или 24 В IP 54 F без вентилятора. ((что идеально подходит под бортовую сеть, запитываемую как у меня планируется от генератора от М-14П - ГСР-3000М (Напряжение отдаваемое, 28,5В, Номинальная мощность, 3 кВА, Номинальный ток, 100 А ) Для контроля и управления расположением штока: Инкрементальный вращающийся энкодер на шахте входа устанавливается для контроля положения. 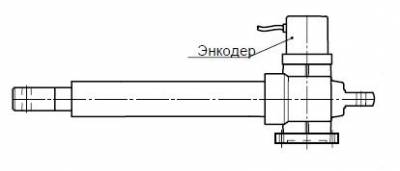 либо Линейный потенциометр 
- А вы молчите! Вы на контрольной такую херню про тахометр натворили !
|
| |
| |
| avm | Дата: Понедельник, 31.08.2009, 16:12 | Сообщение # 3 |
|
Подполковник
Группа: Администраторы
Сообщений: 107
Статус: Offline
| Информация по DC ДВИГАТЕЛЬ 24В или 12В 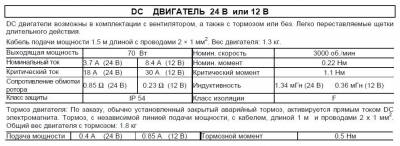 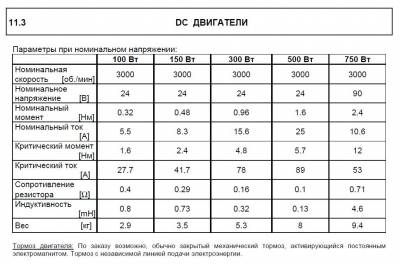 3. Гироскоп (например гироскоп для авиамоделей) Futaba Gyro GY401  Конструктивные особенности гироскопа: Компактный, легкий гироскоп Futaba GY401, основой которого является SMM (Silicon Micro Machine) датчик совмещенный со схемой управления гироскопом. Датчик GY401 имеет нулевой дрейф по температуре (проще говоря изменения температуры не оказывают влияние на выполняемые функции), защищен от вибрации и ударов. Корпус гироскопа изготовлен из специального материала, обладающего антистатическими свойствами. Функциональные особенности GY401: - Возможность переключения режимов Normal / AVCS;
- Управление чувствительностью гироскопа в режимах Normal / AVCS;
- Настройка нейтрального положения режимов Normal / AVCS;
- Различные задержки для сервоприводов с разным быстродействием;
- Переключатель частоты повторения для аналоговых и цифровых сервоприводов: 70 / 270 Hz;
- 270 Hz высокоскоростной сигнал для цифровых сервоприводов;
- Настройка расхода сервоприводов;
- Определение нейтрали в режиме AVCS;
- Установка нейтрального положения при включении на основе анализа текущего положения ручек. 4. Контроллер, связывающий все компоненты в единую сеть
- А вы молчите! Вы на контрольной такую херню про тахометр натворили !
|
| |
| |
| avm | Дата: Понедельник, 31.08.2009, 16:26 | Сообщение # 4 |
|
Подполковник
Группа: Администраторы
Сообщений: 107
Статус: Offline
| Общий принцип работы всей системы будет такой: Сервопривод будет отрабатывать положение РВ по сигналам от РУС ("джойстика"), при наличии возмущения по тангажу вызванного не РУС, с гироскопа на сервопривод подается корректирующий сигнал на перекладку РВ, для нейтрализации возмущения. 
(фото как пример..., в реальности РУС будет немного отличаться) На РУС с помощью потенциометра ("колесико") можно будет задавать "0" для гироскопа, фактически это означает эмуляцию триммера. На боковой панели в кабине будут установлены потенциометры управления чувствительностью гироскопа и сервопривода. Теперь вопрос в том, что-бы "конвертировать " сигнал с ручки управления самолетом (РУС) и от гироскопа в понятный для сервопривода... Придется, видимо обращаться к радиоэлектронщикам, чтоб плату спаять...
- А вы молчите! Вы на контрольной такую херню про тахометр натворили !
|
| |
| |
| avm | Дата: Понедельник, 31.08.2009, 16:29 | Сообщение # 5 |
|
Подполковник
Группа: Администраторы
Сообщений: 107
Статус: Offline
| И вот, совершенно случайно, просматривая подшивку журналов "Моделист конструктор" , я обнаружил в номере 4 за 1990 год статью: "Вращение: и вправо и влево" Вот она: 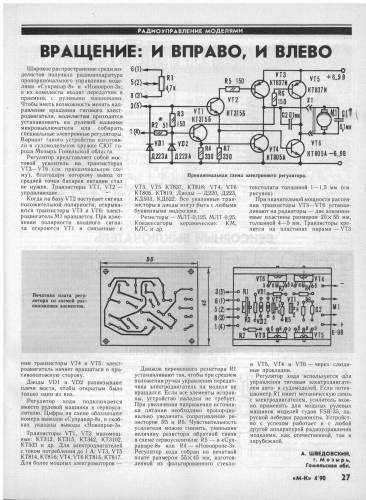 В статье приводится схема управления двигателем от электронного блока, а не от сервомашинки, которая замыкает контакты. Я честно говоря не знаю структуру сигнала от передатчика "Супранр-8" и "Новопроп-3" которые были популярны в то время, но из схемы понял, что этот блок напрямую заменял вот такое устройство : 
(типа рулевая машинка, которая замыкая контакты, меняла вращение двигателя) т.е. сигнал определенной полярности от приемника попадая на выводы 1 и 3 блока управления, заставлял вращаться тяговый двигатель модели. Переменным резистором R1 устанавливался "0" ручки управления двигателем (вал стоит) По аналогии можно предположить, что подавая на вход (выводы 1 и 3) блока управления двигателем сервопривода (БУДС) сигнал от РУС ("джойстик") можно управлять положением штока сервопривода РВ. Потенциометр R1 при этом выполняет роль "триммера", устанавливая "0" для РВ (руля высоты). Предлагаемая "МК" схема содержит потенциал для увеличения напряжения источника питания с 6..9В до 12-24В (как планируется в бортовом питании П-6М). Т.е. имея в запасе свободный вечер и рублей 100 денег можно спаять простейшую схему управления сервоприводом от РУС. Проблема в другом, как сделать так, чтоб кроме РУС, БУДС "понимал" сигнал от гироскопа (я не зря подбирал модель с аналоговым выходным сигналом) и на двигатель сервопривода РВ подавал результирующее напряжение (в зависимости от положения РУС и "плоскости" гироскопа). Этот вопрос и зададим электронщикам. P.S. В схеме блока управления РВ планируется применение не менее 3-х гироскопов (для отказоустойчивости схемы)
- А вы молчите! Вы на контрольной такую херню про тахометр натворили !
|
| |
| |
| avm | Дата: Понедельник, 31.08.2009, 18:18 | Сообщение # 6 |
|
Подполковник
Группа: Администраторы
Сообщений: 107
Статус: Offline
| 
(наш случай "С") Электродистанционная система управления ЭДСУ по замыслу должна реализовать следующие функции: В основном режиме: - требуемые характеристики устойчивости и управляемости при ручном управлении;
- автоматическое предотвращение вывода самолета на установленные ограничения по тангажу по параметрам движения;
- автоматическую и ручную балансировку в продольном канале; В основном и резервном режимах: - возможность перезапуска отказавшего подканала в случае ложного отказа;
- непрерывный контроль исправности ЭДСУ в полете с автоматическим отключением отказавшего подканала и выдачей информации об отказе;
- формирование информации о состоянии системы, о положении управляемых поверхностей, о выполнении подготовительных операций. В резервном режиме: - приемлемые характеристики устойчивости и управляемости в ручном управлении;
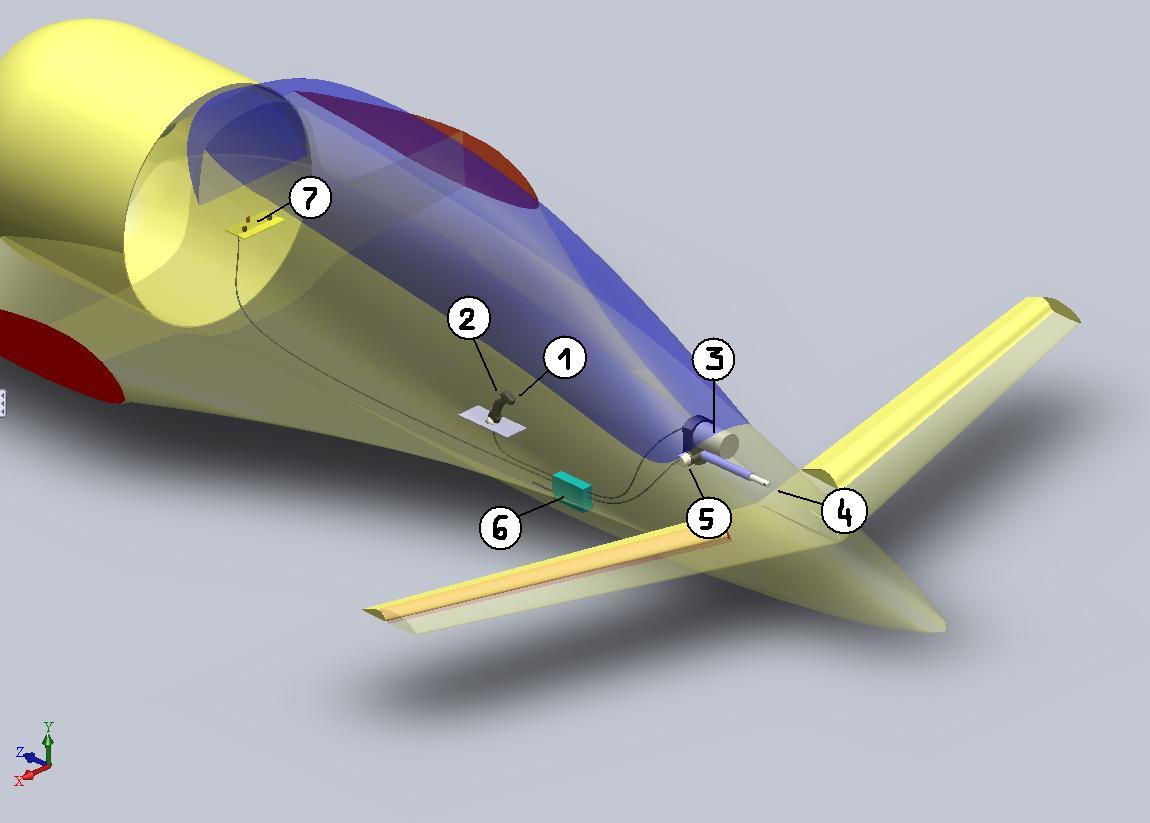
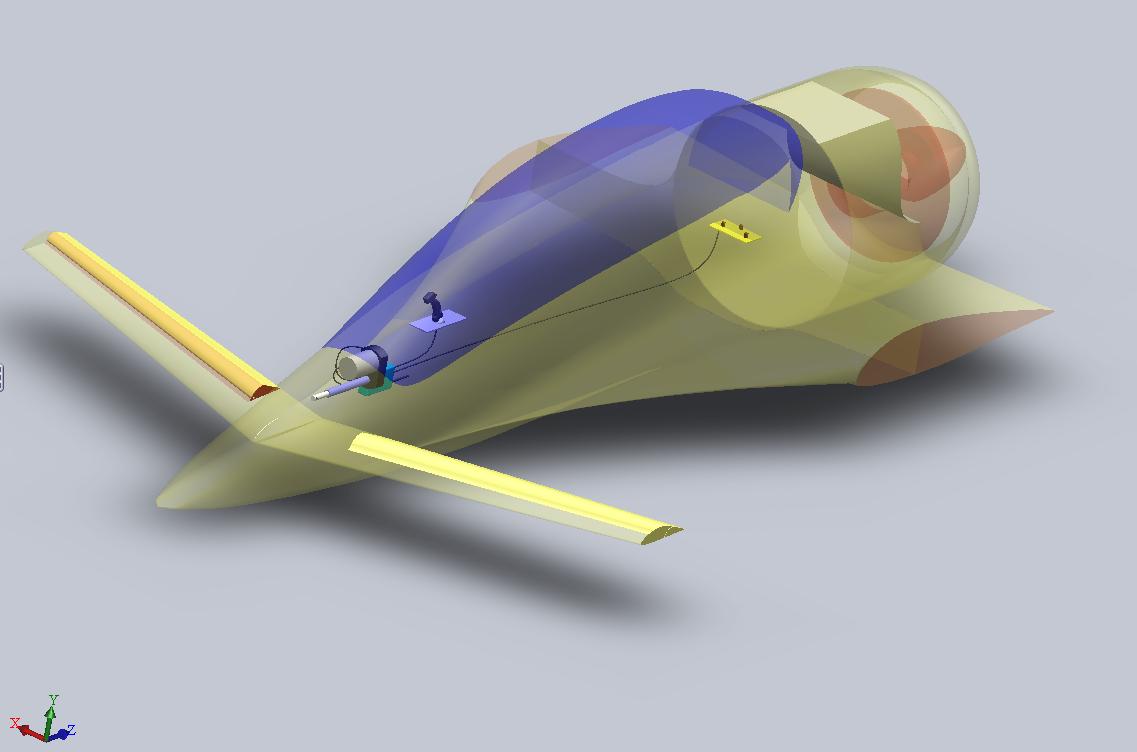
- ручную балансировку в продольном канале. ОБЩАЯ СХЕМА ЭСДУ П-6М 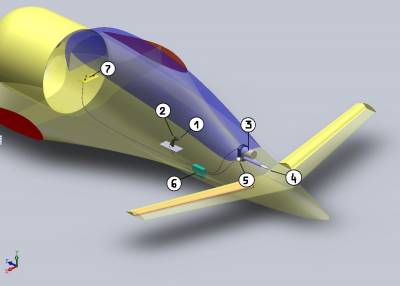 где: 1. РУС
2. Потенциометр "триммера"
3. Сервопривод
4. Тяги управления РВ
5. Энкодер (Линейный потенциометр)
6. Блок управления сервоприводом
7. Блок гироскопов  Продолжение следует...
- А вы молчите! Вы на контрольной такую херню про тахометр натворили !
|
| |
| |
| Anatoliy | Дата: Пятница, 17.12.2010, 19:09 | Сообщение # 7 |
 Подпоручик
Группа: Участники форума
Сообщений: 3
Статус: Offline
| Quote (avm) 3. Гироскоп (например гироскоп для авиамоделей) Futaba Gyro GY401 Кто мне ответит что такое этот гироскоп.
Это акселерометр, то есть измеритель углового ускорения, или это гироскоп, который сохраняет положение оси в пространстве?
И второй вопрос.
Где можно найти его технические параметры и механические, и электрические.
Не по принципу - подключите "таким то" кабелем к устройству номер "такой то", который Вы можете у нас купить. И после всего этого Вы получите массу удовольствия.
|
| |
| |
| avm | Дата: Понедельник, 20.12.2010, 17:32 | Сообщение # 8 |
|
Подполковник
Группа: Администраторы
Сообщений: 107
Статус: Offline
| Quote (Anatoliy) где можно найти его технические параметры и механические, и электрические. Зашел я на сайт Futaba и нашел там мануалы http://www.futabarc.com/manuals/index.html для Futaba Gyro GY401 описание на англицком http://manuals.hobbico.com/fut/futm0807-manual.pdf Посмотрите, может что найдете... Если что, поищем еще... 
- А вы молчите! Вы на контрольной такую херню про тахометр натворили !
|
| |
| |
| Anatoliy | Дата: Вторник, 21.12.2010, 02:19 | Сообщение # 9 |
|
Подпоручик
Группа: Участники форума
Сообщений: 3
Статус: Offline
| Когда я вижу столько много латинских буквочек и очень мало цифрочек меня одолевает разочарование.
Во первых, я не учил английский язык и все это не понимаю.
Во вторых, когда много слов и очень мало технических характеристик я это воспринимаю как рекламу. Если я вижу много технических данных и мало слов, то просто беру и пользуюсь переводчиком. После чего сижу и перевожу все это переведенное на русский технический язык. Роясь по интернету я так не нашёл ничего из технических характеристик об этом "гироскопе". Но зато закралось сомнение, что это все же измеритель угловых ускорений. В свое время я работал с подобными угловыми измерителями. Они ставились в систему управления летающих объектов, которые летали всего несколько минут.
Меня же интересует вопрос, а можно ли сделать из того "гироскопа" - ГИРОСКОП, который будет удерживать свою ось в течении 8 - 10 часов полета с максимальным уходом 1 - 2 градуса?
Сообщение отредактировал Anatoliy - Вторник, 21.12.2010, 02:20 |
| |
| |
| avm | Дата: Среда, 22.12.2010, 00:43 | Сообщение # 10 |
|
Подполковник
Группа: Администраторы
Сообщений: 107
Статус: Offline
| я в таких случаях пишу письмо производителю... в Вашем случае сложнее... Из мануала я понял что там стоит SMM gyro sensor (понятно без перевода) хотя в тексте упоминается и AVCS (Angular Vector Control System) (система управления угловым перемещением)... И есть ссылка на Gyro sensor: SMM (Silicon Micro Machine) system vibration gyro... Думаю там используется датчик углового ускорения... очень похоже... т.к. датчик углового движения становится в "0" при прекращении движения хвостовой балки модели вертолета (этот приборчик для них) "... Conventional gyros send control signals to the rudder servo only when the tail of the helicopter moves. When the tail stops moving, the control signal from the gyro becomes zero..." 
- А вы молчите! Вы на контрольной такую херню про тахометр натворили !
|
| |
| |
| Anatoliy | Дата: Среда, 22.12.2010, 02:40 | Сообщение # 11 |
|
Подпоручик
Группа: Участники форума
Сообщений: 3
Статус: Offline
| Quote (avm) Думаю там используется датчик углового ускорения... очень похоже... А жаль.
Как обычно халявы не получилось - из игрушки сделать полноценный гироскоп.
|
| |
| |
| avm | Дата: Среда, 22.12.2010, 12:06 | Сообщение # 12 |
|
Подполковник
Группа: Администраторы
Сообщений: 107
Статус: Offline
| Но попробовать можно, есть ведь "волшебные коробки" и посложнее... Надо будет порыться в инете, посмотреть что есть.. буду выкладывать по мере отыскания... 
- А вы молчите! Вы на контрольной такую херню про тахометр натворили !
|
| |
| |
|